
Home Assistant no integra de forma nativa este modelo tal como hacia con el modelo Vacuum 2 , para ello copiaremos en custom_components/miio2 los cuatro ficheros que encontraremos en este enlace.
Añadiremos en configuration.yaml la configuración del robot
vacuum:
- platform: miio2
# https://github.com/nqkdev/home-assistant-vacuum-styj02ym
host: 192.168.1.204
token: !secret vacuum_token
name: Robot Mop ProEl token lo podemos sacar de varias maneras , pero la mas cómoda es con la aplicación mi Home vevs que nos lo da directamente.
Una vez lo vemos ya en nuestro Home Assistant podemos empezar a crear los sensores para nuestras tarjetas y automatizaciones.
Lo primero un sensor que nos guarde el valor de la bateria para poder controlar su estado.
mayordomo_battery_level:
friendly_name: Robot Chu-Li
value_template: "{{ states.vacuum.robot_mop_pro.attributes.battery_level|default(-1)| int(0) if states.vacuum.robot_mop_pro is not none }}"
unit_of_measurement: '%'
icon_template: '{% if states.vacuum.robot_mop_pro.attributes.battery_level == 100 %}
mdi:battery
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 90 %}
mdi:battery-90
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 80 %}
mdi:battery-80
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 70 %}
mdi:battery-70
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 60 %}
mdi:battery-60
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 50 %}
mdi:battery-50
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 40 %}
mdi:battery-40
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 30 %}
mdi:battery-30
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 20 %}
mdi:battery-20
{% elif states.vacuum.robot_mop_pro.attributes.battery_level >= 10 %}
mdi:battery-10
{% else %}
mdi:battery-outline
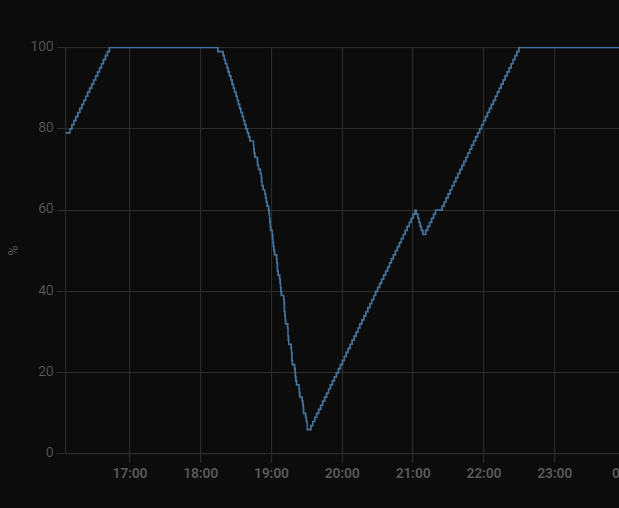
{% endif %}'Esto nos permitirá ver por ejemplo que cuando estaba al 6% ha vuelto ,se ha recargado hasta el 60% y entonces ha acabado el ciclo de limpieza volviendo al dock a cargarse completamente
Crearemos unos sensores extras para poder ver los valores en nuestra tarjeta del robot.
# Estado de la aspiradora
- platform: template
sensors:
vacuum_status:
value_template: '{{states.vacuum.robot_mop_pro.state}}'
friendly_name: Estado de la aspiradora
icon_template: mdi:information-variant
# Nivel de batería de la aspiradora
- platform: template
sensors:
vacuum_battery_level:
value_template: '{{ states.vacuum.robot_mop_pro.attributes.battery_level | int(0) }}'
unit_of_measurement: '%'
friendly_name: Batería restante
icon_template: mdi:battery
# Velocidad de Aspiración
- platform: template
sensors:
vacuum_fan_speed:
friendly_name: Velocidad Aspiración
value_template: 'Modo Aspiración: {{ states.vacuum.robot_mop_pro.attributes.fan_speed }}'
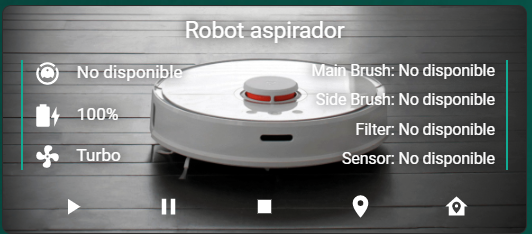
icon_template: 'mdi:speedometer'Quedaria algo asi
Y a partir de ahí ya podemos empezar a programar nuestras automatizaciones , esta por ejemplo es parte del bot de Telegram que nos da información del robot y nos permite interactuar con el desde Telegram.
telegram_estado_robot_aspirador:
alias: telegram_estado_robot_aspirador
sequence:
- service: notify.notif_telegram_bot
data:
message: "*Pulsado estado robot*"
- service: notify.notif_telegram_bot
data_template:
# title: 'Menú'
message: |
{{"\U0001F300"}} *Estado robot aspirador* {{"\U0001F300"}}
{{"\U0001f50b"}} *Bateria:* {{ states.vacuum.robot_mop_pro.attributes.battery_level }}%
{{"\U0001F300"}} *Velocidad aspirado:* {{states.vacuum.robot_mop_pro.attributes.fan_speed}}
{{"\U0001f4ab"}} *Estado actual:* {{states.vacuum.robot_mop_pro.state}}
data:
inline_keyboard:
- 'Aspirador ON:/estado_robot_on, Aspirador OFF:/estado_robot_off'
- 'Aspirador Pausa:/estado_robot_pause, Aspirador BASE:/estado_robot_base'
- 'Principal:/cancel'Y esta por ejemplo para que nos avise por Telegram , y también nos de un mensaje via TTS a traves de los altavoces de los dos Google Home.
- alias: Empezando a limpiar
initial_state: 'on'
trigger:
- entity_id: vacuum.robot_mop_pro
platform: state
to: cleaning
condition:
condition: state
entity_id: input_boolean.int_menos_notificaciones
state: 'off'
action:
- service: notify.notif_telegram_bot
data:
message: "Robot Xiaomi *comenzando* limpieza"
- alias: Limpieza Acabada
initial_state: 'on'
trigger:
- entity_id: vacuum.robot_mop_pro
platform: state
from: cleaning
to: idle
condition:
condition: state
entity_id: input_boolean.int_menos_notificaciones
state: 'off'
action:
- service: notify.notif_telegram_bot
data:
message: "Robot Xiaomi *limpieza acabada*"
- service: tts.google_cloud
entity_id: media_player.lenovocd_24502f2519
data:
message: 'Robot Xiaomi limpieza acabada'
- service: tts.google_cloud
entity_id: media_player.googlehome2670
data:
message: 'Robot Xiaomi limpieza acabada'Y con esto y un bizcocho ….