
En este caso usaremos el sensor ambiental de Bosch BME680
Para ello usaremos la placa que montamos hace unos días que al final poco a poco será una estación meteorológica con conexión a nuestra domótica vía MQTT
El esquema es el siguiente ( de momento no usaremos la pantalla OLED )
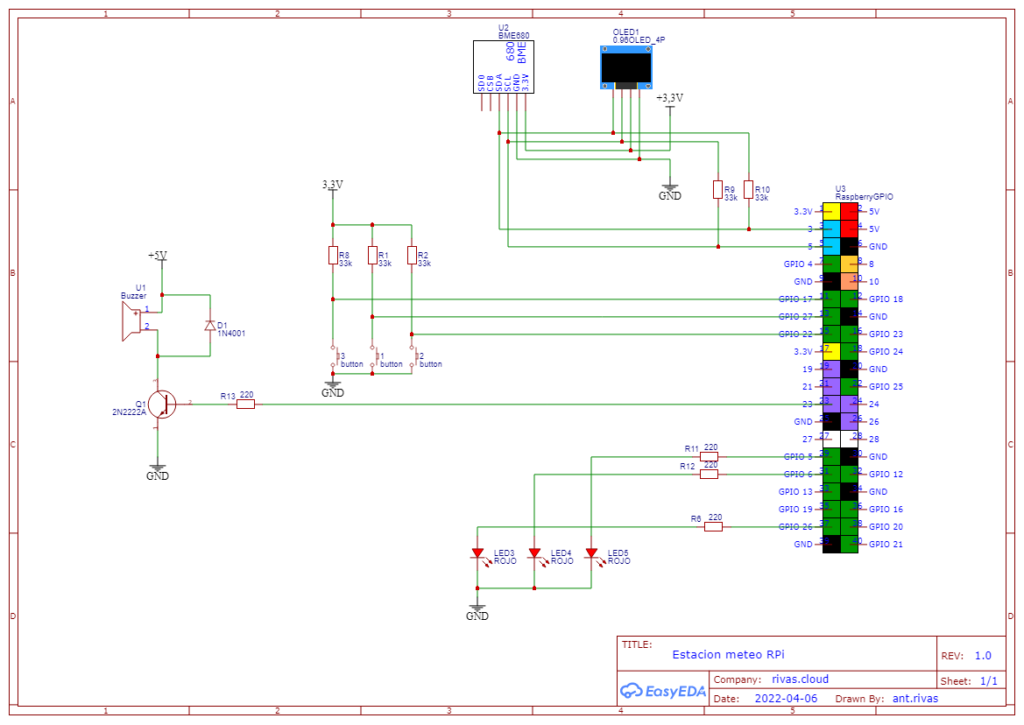
En esta ocasión empezaremos a trabajar con el bus I2C , para ello colocaremos dos resistencias de 33K de pull-up en la líneas de SDA y SCL
Lo primero es activar el bus I2C con raspi-config




Instalaremos i2cdetect que esta en el paquete i2c-tools
apt-get install i2c-tools
Comprobaremos que nos detecta el dispositivo en el bus I2C
sudo i2cdetect -y 1
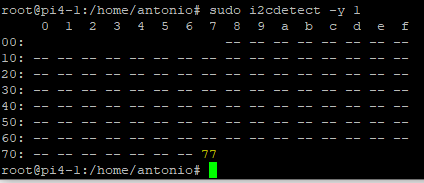
En este caso ha detectado un dispositivo en la dirección 0x77 , que si miramos aqui el manual veremos que es la dirección por defecto.
By default, the i2c address is 0x77. If you add a jumper from SDO to GND, the address will change to 0x76
Para probar la respuesta podemos usar
i2cget -y 1 0x77 0x00
Nos devolverá el valor de esa posición
En la raiz del proyecto ejecutar
dotnet tool install --global dotnet-ssh
Y para configurar seguir los pasos que nos va preguntando
dotnet-ssh configure MyRaspberryPi --auth-type UserSecrets --auth usuario:contraseña
El contenido del fichero Program.cs seria el siguiente
using System;
using System.Device.Gpio;
using System.Threading;
using Iot.Device.Buzzer;
using System.Device.I2c;
using Iot.Device.Bmxx80;
using Iot.Device.Common;
using UnitsNet;
using Iot.Device.Bmxx80.PowerMode;
using System.Timers;
using System.Threading.Tasks;
using System.IO;
using System.Runtime.InteropServices;
namespace Test_BME680
{
class RPi
{
private static System.Timers.Timer timer_lecturas;
static void Main(string[] args)
{
//Codigo Raspberry pi
//Definicion de I/O
int Led_Rojo = 26;
int Led_Verde = 6;
int Led_Amarillo = 5;
int pulsador_1 = 17;
int pulsador_2 = 27;
int pulsador_3 = 22;
int pin_buzzer = 23;
GpioController controller = new GpioController();
Buzzer buzzer;
//Timer lecturas cada 30 segundos
timer_lecturas = new System.Timers.Timer(30000);
timer_lecturas.Elapsed += evento_timer_lecturas;
timer_lecturas.AutoReset = true;
timer_lecturas.Enabled = true;
//Configuracion
bool Es_Windows = false;
string Dir_Logs = "logs";
string Dir_Config = "config";
string Path_logs;
string Path_config;
string cVersion = "1.0";
string sTituloVentana = "Test BME680 RPi";
////I2C
const int busId = 1;
I2cConnectionSettings i2cSettings = new I2cConnectionSettings(busId, 0x77);
I2cDevice i2cDevice = I2cDevice.Create(i2cSettings);
Globales.bme680 = new Bme680(i2cDevice, Temperature.FromDegreesCelsius(20.0));
Globales.bme680.SetPowerMode(Bme680PowerMode.Forced);
// reset will change settings back to default
Globales.bme680.Reset();
//Modo de trabajo I/O
controller.OpenPin(Led_Verde, PinMode.Output);
controller.OpenPin(Led_Amarillo, PinMode.Output);
controller.OpenPin(Led_Rojo, PinMode.Output);
controller.OpenPin(pulsador_1, PinMode.InputPullUp);
controller.OpenPin(pulsador_2, PinMode.InputPullUp);
controller.OpenPin(pulsador_3, PinMode.InputPullUp);
controller.OpenPin(pin_buzzer, PinMode.Output);
buzzer = new Buzzer(pin_buzzer);
controller.Write(Led_Verde, PinValue.Low);
controller.Write(Led_Amarillo, PinValue.Low);
controller.Write(Led_Rojo, PinValue.Low);
Es_Windows = RuntimeInformation.IsOSPlatform(OSPlatform.Windows);
Configuracion();
// Borrado de trazas
borra_trazas_antiguas();
Escribe_Traza("Borrando ficheros anteriores a un mes ..... ");
Escribe_Traza("Aplicacion iniciada ..... , versión : " + cVersion);
Console.Title = sTituloVentana;
if (Es_Windows == true)
{
Escribe_Traza("Ejecutandose en entorno Windows");
}
else
{
Escribe_Traza("Ejecutandose en entorno Linux");
}
var localZone = TimeZone.CurrentTimeZone;
var ahora = DateTime.Now;
Escribe_Traza("Standard time name: " + localZone.StandardName);
Escribe_Traza("Daylight saving time name: " + localZone.DaylightName);
Globales.bme680.Reset();
lecturaAsync();
while (true)
{
Thread.Sleep(2500);
}
static async Task lecturaAsync()
{
Console.WriteLine("################################################################");
Escribe_Consola("Lectura", ConsoleColor.Yellow);
//Aumentamos la resolución
Globales.bme680.TemperatureSampling = Sampling.HighResolution;
Globales.bme680.HumiditySampling = Sampling.HighResolution;
Globales.bme680.PressureSampling = Sampling.HighResolution;
Globales.bme680.GasConversionIsEnabled = true;
Globales.bme680.HeaterIsEnabled = true;
Globales.bme680.ConfigureHeatingProfile(Bme680HeaterProfile.Profile2, Temperature.FromDegreesCelsius(320), Duration.FromMilliseconds(150), Temperature.FromDegreesCelsius(21));
Globales.bme680.HeaterProfile = Bme680HeaterProfile.Profile2;
Thread.Sleep(1000);
//Leemos los datos
var readResult = Globales.bme680.Read();
Globales.resistencia = Convert.ToSingle(readResult.GasResistance?.Ohms);
Globales.temperatura = Convert.ToSingle(readResult.Temperature?.Value);
Globales.presion = Convert.ToSingle(readResult.Pressure?.Value) / 100;
Globales.humedad = Convert.ToSingle(readResult.Humidity?.Value);
if (readResult.Temperature.HasValue && readResult.Pressure.HasValue)
{
Globales.altitud = Convert.ToSingle(WeatherHelper.CalculateAltitude(readResult.Pressure.Value, Globales.defaultSeaLevelPressure, readResult.Temperature.Value).Meters);
}
if (readResult.Temperature.HasValue && readResult.Humidity.HasValue)
{
Globales.sensacion_calor = Convert.ToSingle(WeatherHelper.CalculateHeatIndex(readResult.Temperature.Value, readResult.Humidity.Value).DegreesCelsius);
Globales.punto_rocio = Convert.ToSingle(WeatherHelper.CalculateDewPoint(readResult.Temperature.Value, readResult.Humidity.Value).DegreesCelsius);
}
Console.WriteLine("################################################################");
Console.WriteLine($"Resistencia gas: {Globales.resistencia:0.##} Ohmios");
Console.WriteLine($"Temperatura: {Globales.temperatura:0.#} \u00B0C");
Console.WriteLine($"Presión: {Globales.presion:0.##} mbs.");
Console.WriteLine($"Humedad relativa: {Globales.humedad:0.#} %");
Console.WriteLine($"Altitud: {Globales.altitud:0.##} mts.");
Console.WriteLine($"Sensación calor: {Globales.sensacion_calor:0.#} \u00B0C");
Console.WriteLine($"Punto rocio: {Globales.punto_rocio:0.#} \u00B0C");
Console.WriteLine("################################################################");
Console.WriteLine("");
}
void evento_timer_lecturas(Object source, ElapsedEventArgs e)
{
Globales.hora_lectura = e.SignalTime;
controller.Write(Led_Rojo, PinValue.High);
lecturaAsync();
controller.Write(Led_Rojo, PinValue.Low);
}
//#################################################################################################
// Codigo generico
//#################################################################################################
void Escribe_ambas_trazas(string cCadena, bool lConsola = true, ConsoleColor Color_Texto = ConsoleColor.White)
{
Escribe_Traza(cCadena, lConsola, Color_Texto);
Escribe_Traza_Errores(cCadena, lConsola, Color_Texto);
}
void Configuracion()
{
string cSalida = "";
// Comprobamos que existe el directorio , si no lo creamos
if (Es_Windows == true)
{
Path_logs = System.AppDomain.CurrentDomain.BaseDirectory + Dir_Logs + @"\";
Path_config = System.AppDomain.CurrentDomain.BaseDirectory + Dir_Config + @"\";
}
else
{
Path_logs = System.AppDomain.CurrentDomain.BaseDirectory + Dir_Logs + "/";
Path_config = System.AppDomain.CurrentDomain.BaseDirectory + Dir_Config + "/";
}
Console.WriteLine("Ruta ficheros trazas : " + Path_logs);
if (System.IO.Directory.Exists(Path_logs) == false)
{
Console.WriteLine("No existe " + Path_logs + ", lo creamos ... ");
System.IO.Directory.CreateDirectory(Path_logs);
}
Console.WriteLine("Ruta ficheros configuracion : " + Path_config);
if (System.IO.Directory.Exists(Path_config) == false)
{
Console.WriteLine("No existe " + Path_config + ", lo creamos ... ");
System.IO.Directory.CreateDirectory(Path_config);
}
}
static void Escribe_Consola(string cTexto, ConsoleColor Color = ConsoleColor.Green)
{
Console.OutputEncoding = System.Text.Encoding.Default;
Console.ForegroundColor = ConsoleColor.Green;
Console.Write(DateTime.Now.ToString("HH:mm:ss.fff") + " -> ");
Console.ForegroundColor = Color;
Console.WriteLine(cTexto);
Console.ForegroundColor = ConsoleColor.Gray;
}
void Escribe_Traza_Errores(string cLinea, bool lConsola = true, ConsoleColor Color_Texto = ConsoleColor.Red)
{
string path = Path_logs + "Errores_" + DateTime.Now.ToString("dd-MM-yy") + ".txt";
try
{
StreamWriter sw = File.AppendText(path);
Escribe_Traza(cLinea, lConsola);
// cLinea = Format(Now, "HH:mm:ss.fff") & "-> " & cLinea
if (cLinea != null)
{
sw.WriteLine(DateTime.Now.ToString("HH:mm:ss.fff") + " -> " + cLinea);
sw.Flush();
sw.Close();
}
}
catch
{
}
if (lConsola == true)
{
Console.OutputEncoding = System.Text.Encoding.Default;
Console.ForegroundColor = Color_Texto;
Console.Write(DateTime.Now.ToString("HH:mm:ss.fff") + " -> ");
Console.WriteLine("Error : " + cLinea);
Console.ResetColor();
}
System.Environment.Exit(0); /* TODO ERROR: Skipped SkippedTokensTrivia */
}
void borra_trazas_antiguas()
{
// Trazas
System.IO.DirectoryInfo Folder;
DateTime fecha_borrado = DateTime.Now.AddMonths(-1);
Folder = new System.IO.DirectoryInfo(Path_logs);
// WINDOWS
// If Folder.FullName.StartsWith("C:\") = True Then
if (Es_Windows == true)
{
foreach (System.IO.FileInfo fichero in Folder.GetFiles("traza_*.txt", System.IO.SearchOption.AllDirectories))
{
if (fichero.LastWriteTime <= fecha_borrado)
{
try
{
File.Delete(fichero.FullName);
Console.WriteLine("Borrado del fichero : " + fichero.Name);
}
catch (Exception ex)
{
Console.WriteLine("ERROR al borrar el fichero : " + fichero.Name + " ," + ex.Message);
}
}
}
foreach (System.IO.FileInfo fichero in Folder.GetFiles("Errores_*.txt", System.IO.SearchOption.AllDirectories))
{
if (fichero.LastWriteTime <= fecha_borrado)
{
try
{
File.Delete(fichero.FullName);
Console.WriteLine("Borrado del fichero : " + fichero.Name);
}
catch (Exception ex)
{
Console.WriteLine("ERROR al borrar el fichero : " + fichero.Name + " , " + ex.Message);
}
}
}
}
else
{
// LINUX y/o DOCKER
foreach (System.IO.FileInfo fichero in Folder.GetFiles("traza_*.txt", System.IO.SearchOption.AllDirectories))
{
if (fichero.LastWriteTime <= fecha_borrado)
{
try
{
File.Delete(fichero.FullName);
Console.WriteLine("Borrado del fichero : " + fichero.Name);
}
catch (Exception ex)
{
Console.WriteLine("ERROR al borrar el fichero : " + fichero.Name + " , " + ex.Message);
}
}
}
foreach (System.IO.FileInfo fichero in Folder.GetFiles("Errores_*.txt", System.IO.SearchOption.AllDirectories))
{
if (fichero.LastWriteTime <= fecha_borrado)
{
try
{
File.Delete(fichero.FullName);
Console.WriteLine("Borrado del fichero : " + fichero.Name);
}
catch (Exception ex)
{
Console.WriteLine("ERROR al borrar el fichero : " + fichero.Name + " , " + ex.Message);
}
}
}
}
}
void Escribe_Traza(string cLinea, bool lConsola = true, ConsoleColor Color_Texto = ConsoleColor.White)
{
string path = Path_logs + "traza_" + DateTime.Now.ToString("dd-MM-yy") + ".txt";
try
{
StreamWriter sw = File.AppendText(path);
// cLinea = Format(Now, "HH:mm:ss.fff") & "-> " & cLinea
if (cLinea != null)
{
sw.WriteLine(DateTime.Now.ToString("HH:mm:ss.fff") + " -> " + cLinea);
sw.Flush();
sw.Close();
}
}
catch
{
}
if (lConsola == true)
{
Console.OutputEncoding = System.Text.Encoding.Default;
Console.ForegroundColor = ConsoleColor.Green;
Console.Write(DateTime.Now.ToString("HH:mm:ss.fff") + " -> ");
Console.ForegroundColor = Color_Texto;
Console.WriteLine(cLinea);
Console.ForegroundColor = ConsoleColor.Gray;
}
}
}
static class Globales
{
public static Bme680 bme680;
public static float temperatura = 0;
public static float resistencia = 0;
public static float presion = 0;
public static float humedad = 0;
public static float altitud = 0;
public static float sensacion_calor = 0;
public static float punto_rocio = 0;
public static Pressure defaultSeaLevelPressure = WeatherHelper.MeanSeaLevel;
public static DateTime hora_lectura = DateTime.Now;
}
}
}Lo compilaremos y subiremos a nuestra Raspberry Pi
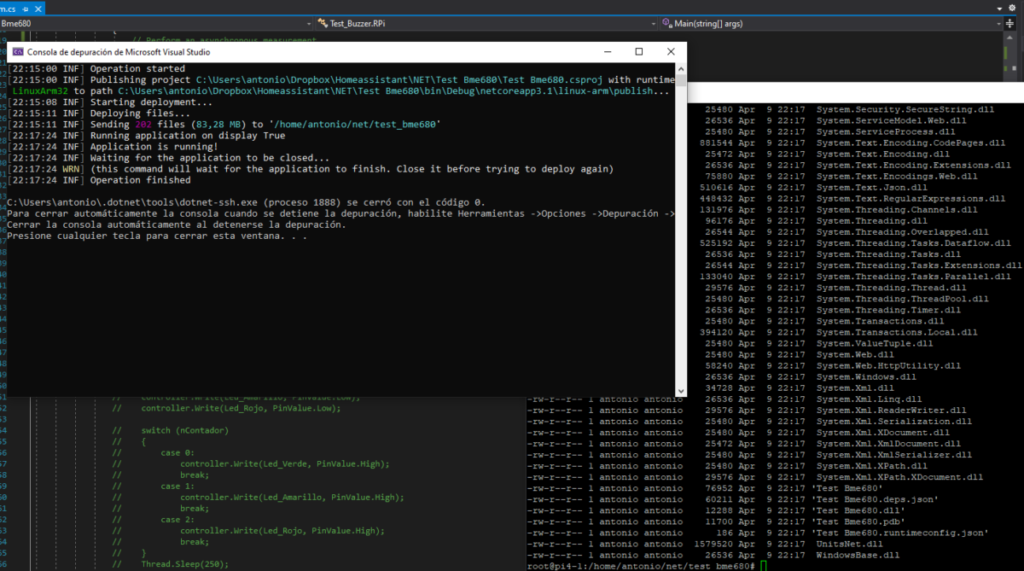
Y lo ejecutaremos con
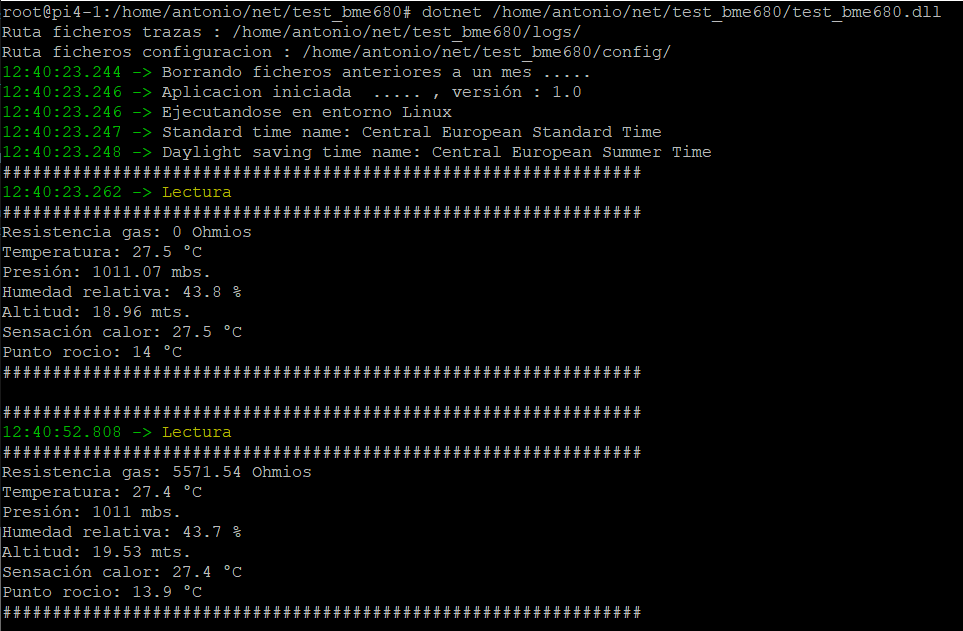
dotnet /home/antonio/net/test_bme680/test_bme680.dll
Veremos como empieza a mostrarnos las lecturas cada 30 segundos.
Problemas surgidos durante la programación del dispositivo , perdí un par de horas bien buenas debido a que al ejecutar el código daba un error genérico 121 , al final después de buscar y probar era una supina tonteria , por lo visto los señores de Microsoft y a los señores de Bosch no tienen en mismo concepto de default address ,

Al final la solución esta en forzar la dirección del dispositivo
I2cConnectionSettings i2cSettings = new I2cConnectionSettings(busId, 0x77);
ya que la asignada por defecto en Microsoft apunta entre Cuenca y Badajoz , aunque en el código de GitHub es correcto , en las librerías no lo es.
Con esto y un bizcocho ………….
BONUS :
Con este comando veremos la configuración actual del GPIO
raspi-gpio get
BANK0 (GPIO 0 to 27): GPIO 0: level=1 fsel=0 func=INPUT pull=UP GPIO 1: level=1 fsel=0 func=INPUT pull=UP GPIO 2: level=1 fsel=4 alt=0 func=SDA1 pull=UP GPIO 3: level=1 fsel=4 alt=0 func=SCL1 pull=UP GPIO 4: level=1 fsel=0 func=INPUT pull=UP GPIO 5: level=1 fsel=0 func=INPUT pull=UP GPIO 6: level=1 fsel=0 func=INPUT pull=UP GPIO 7: level=1 fsel=0 func=INPUT pull=UP GPIO 8: level=1 fsel=0 func=INPUT pull=UP GPIO 9: level=0 fsel=0 func=INPUT pull=DOWN GPIO 10: level=0 fsel=0 func=INPUT pull=DOWN GPIO 11: level=0 fsel=0 func=INPUT pull=DOWN GPIO 12: level=0 fsel=0 func=INPUT pull=DOWN GPIO 13: level=0 fsel=0 func=INPUT pull=DOWN GPIO 14: level=1 fsel=0 func=INPUT pull=NONE GPIO 15: level=1 fsel=0 func=INPUT pull=UP GPIO 16: level=0 fsel=0 func=INPUT pull=DOWN GPIO 17: level=1 fsel=0 func=INPUT pull=DOWN GPIO 18: level=0 fsel=0 func=INPUT pull=DOWN GPIO 19: level=0 fsel=0 func=INPUT pull=DOWN GPIO 20: level=1 fsel=0 func=INPUT pull=UP GPIO 21: level=0 fsel=0 func=INPUT pull=DOWN GPIO 22: level=1 fsel=0 func=INPUT pull=DOWN GPIO 23: level=0 fsel=0 func=INPUT pull=DOWN GPIO 24: level=0 fsel=0 func=INPUT pull=DOWN GPIO 25: level=0 fsel=0 func=INPUT pull=DOWN GPIO 26: level=0 fsel=0 func=INPUT pull=DOWN GPIO 27: level=1 fsel=0 func=INPUT pull=DOWN BANK1 (GPIO 28 to 45): GPIO 28: level=1 fsel=2 alt=5 func=RGMII_MDIO pull=UP GPIO 29: level=0 fsel=2 alt=5 func=RGMII_MDC pull=DOWN GPIO 30: level=0 fsel=7 alt=3 func=CTS0 pull=UP GPIO 31: level=0 fsel=7 alt=3 func=RTS0 pull=NONE GPIO 32: level=1 fsel=7 alt=3 func=TXD0 pull=NONE GPIO 33: level=1 fsel=7 alt=3 func=RXD0 pull=UP GPIO 34: level=1 fsel=7 alt=3 func=SD1_CLK pull=NONE GPIO 35: level=1 fsel=7 alt=3 func=SD1_CMD pull=UP GPIO 36: level=1 fsel=7 alt=3 func=SD1_DAT0 pull=UP GPIO 37: level=1 fsel=7 alt=3 func=SD1_DAT1 pull=UP GPIO 38: level=1 fsel=7 alt=3 func=SD1_DAT2 pull=UP GPIO 39: level=1 fsel=7 alt=3 func=SD1_DAT3 pull=UP GPIO 40: level=0 fsel=4 alt=0 func=PWM1_0 pull=NONE GPIO 41: level=0 fsel=4 alt=0 func=PWM1_1 pull=NONE GPIO 42: level=0 fsel=1 func=OUTPUT pull=UP GPIO 43: level=1 fsel=0 func=INPUT pull=UP GPIO 44: level=1 fsel=0 func=INPUT pull=UP GPIO 45: level=1 fsel=0 func=INPUT pull=UP BANK2 (GPIO 46 to 53): GPIO 46: level=0 fsel=0 func=INPUT pull=UP GPIO 47: level=0 fsel=0 func=INPUT pull=UP GPIO 48: level=0 fsel=0 func=INPUT pull=DOWN GPIO 49: level=0 fsel=0 func=INPUT pull=DOWN GPIO 50: level=0 fsel=0 func=INPUT pull=DOWN GPIO 51: level=0 fsel=0 func=INPUT pull=DOWN GPIO 52: level=0 fsel=0 func=INPUT pull=DOWN GPIO 53: level=0 fsel=0 func=INPUT pull=DOWN
Si queremos cambiar la configuración del bus I2C lo haremos en el fichero config.txt
nano /boot/config.txt
Habilitaremos estas estas líneas y añadiremos las que falten
# Uncomment some or all of these to enable the optional hardware interfaces #dtparam=i2c_arm=on dtparam=i2s=on dtparam=spi=on # *** I2C *** # *** Changingspeed*** # dtparam=i2c_arm=on,i2c_arm_baudrate=50000 # dtparam=i2c_arm=on,i2c_arm_baudrate=100000 # dtparam=i2c_arm=on,i2c_arm_baudrate=400000 # dtparam=i2c_arm=on,i2c_arm_baudrate=1000000 # *** Configuring I2 buses *** dtoverlay=i2c-gpio,i2c_gpio_sda=2,i2c_gpio_scl=3,i2c_gpio_delay_us=2,bus=1