
El otro día llegaron a mis manos un par de portátiles nuevos para configurarlos , como siempre suelo usar una imagen creada con Macrium Reflect , configuro la BIOS como siempre y ante mi sorpresa no había forma de ponerlo en Boot mode legacy , y no aparecía en la lista de dispositivos de arranque el disco duro.
Busco en internet a ver que leches estaba pasando , pero lo que encontré ya lo había hecho , y el bicho seguía sin mostrar la unidad de disco ,
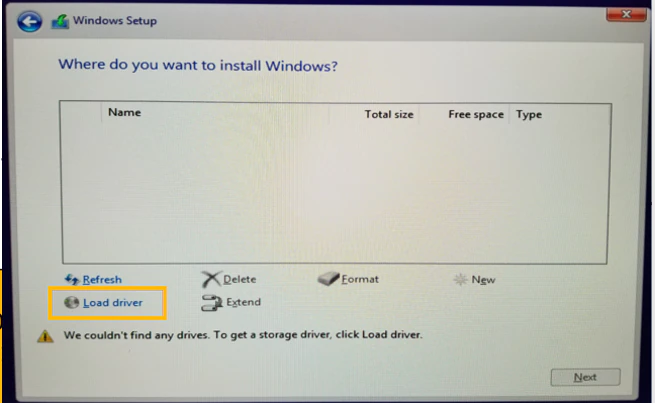
Creo un nuevo medio de instalación de W10 y le pongo los drivers VMD de intel , pero aun cargando dichos drivers , el disco ni aparecía para poder instalar W10 …
Según Intel esto es VMD
Intel® VMD es una característica del procesador escalable Intel® Xeon® que permite el control y la gestión directos de SSD NVMe desde el bus PCIe sin la necesidad de adaptadores de hardware adicionales. Esta sólida funcionalidad para SSD NVMe permite una transición sin problemas a un almacenamiento NVMe sin limitar el tiempo de inactividad de la infraestructura crítica. Intel® VMD aporta características de fiabilidad, disponibilidad y mantenimiento (RAS) empresariales a las SSD NVMe, lo que le permitirá implementar almacenamiento de próxima generación con total confianza. Transición a NVMe con Intel® VMD Intel® Volume Management Device (Intel® VMD) está diseñado específicamente para la gestión de grado empresarial de SSD NVMe conectadas a CPU Intel® Xeon®. Cada puerto raíz consisten en un agrupamiento de 16 canales PCIe Intel® Xeon® que crean un único Intel® VMD Domain. Los puertos raíz actúan como un HBA integrado que ofrece una base sólida para respaldar el ecosistema NVMe con la siguiente funcionalidad: Aislamiento de errores del SO anfitrión Compatibilidad con conexión en funcionamiento y eliminación de imprevistos Gestión LED estándar RAID de arranque
Me puse a ver como deshabilitar VMD para poder hacer visible el disco M2 , y encontré esta nota el lenovo , pero la sorpresa es que en la BIOS del Acer ni de coña se podia , al final decidi ponerme en contacto con Acer y me enviaron este email para solventar el problema.
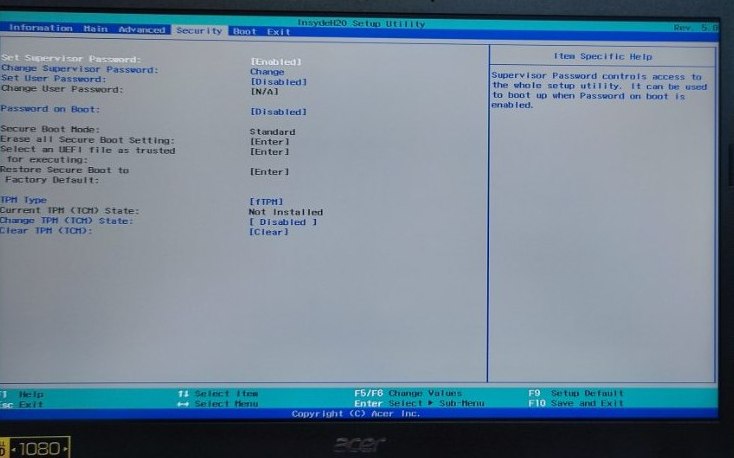
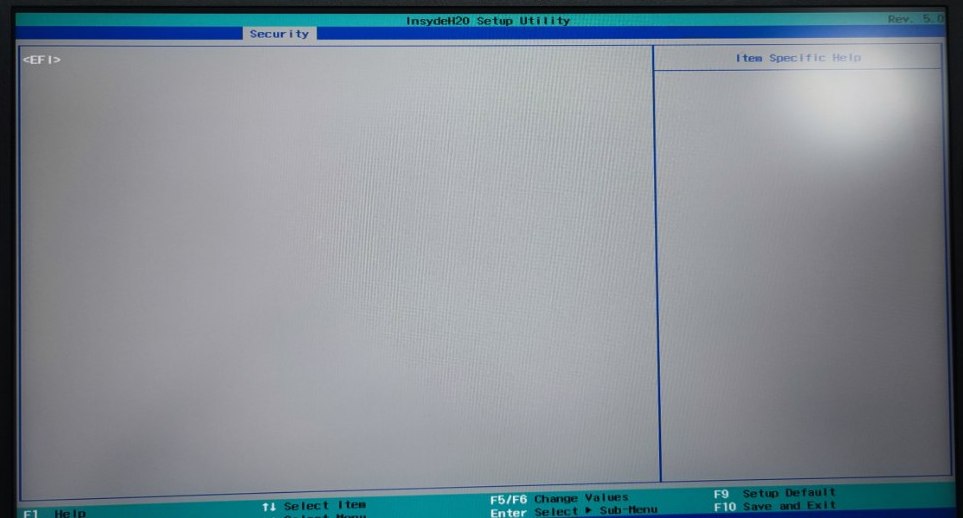
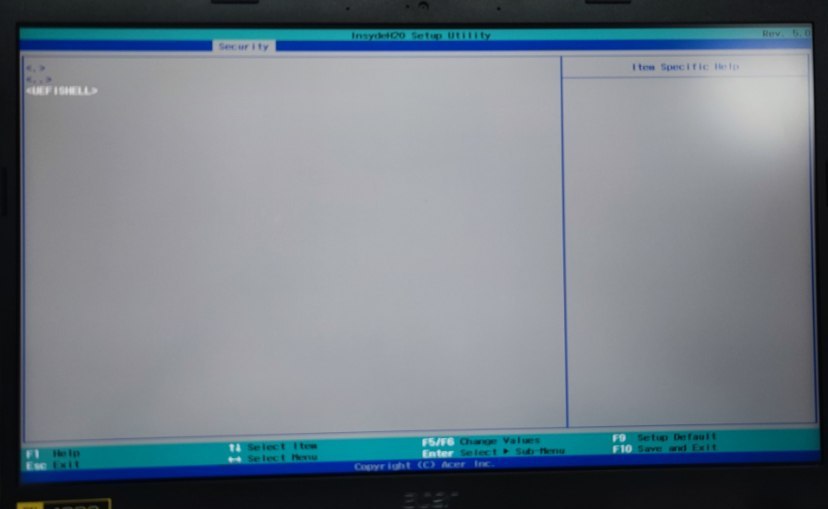
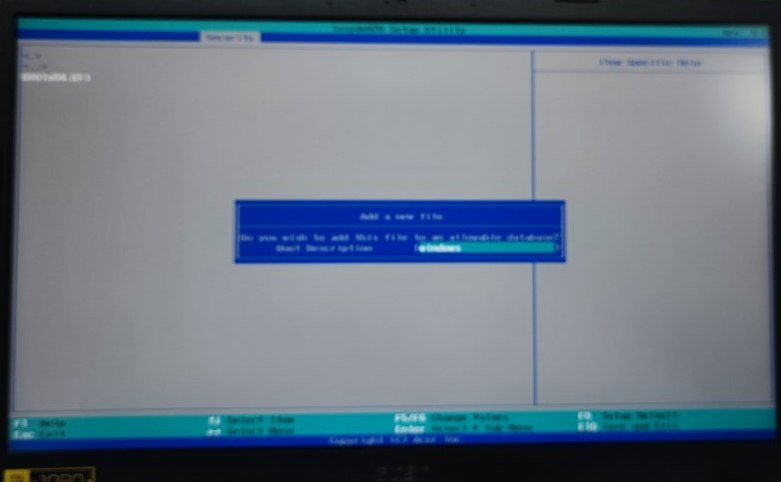
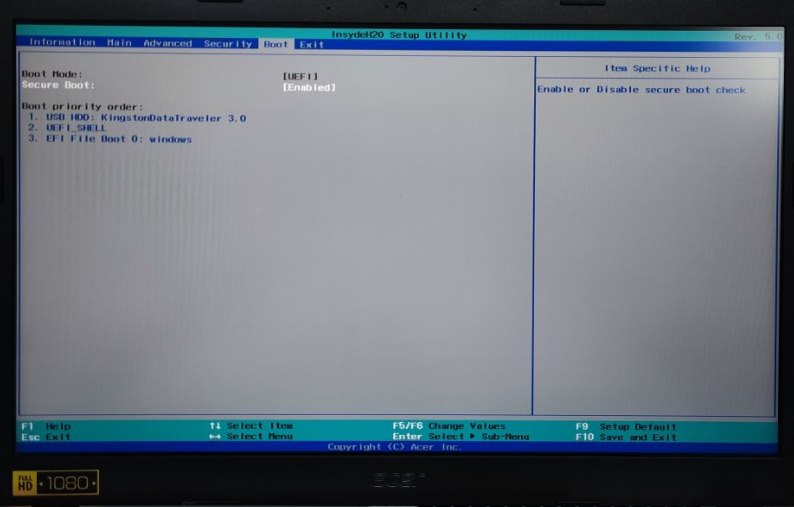
Estimado Cliente, En relación a su consulta, aquí los pasos para empezar la instalación del sistema operativo Windows 10 en su portátil Acer. 1) A través del siguiente enlace, descargue la herramienta de Microsoft (MediaCreationTool1909.exe) para crear un medio de instalación USB de Windows 10 en modo UEFI: https://www.microsoft.com/es-es/software-download/windows10 2) Ejecute el programa recién descargado, acepte los términos de licencia y seleccione la opción: Crear medios de instalación (unidad flash USB, DVD o archivo ISO) para otro PC 3) Seleccione el idioma, la arquitectura e la edición: español (España) / Windows 10 / 64-bit (x64) 4) Elija que medio usar: Unidad flash USB (se necesita un pendrive de 8GB mínimo, que será formateado y dedicado para este uso) 5) Un vez terminada la creación del medio de instalación USB de Windows 10 en modo UEFI, conéctelo al portátil Acer donde quiere instalar el Windows 10 6) Al encender el portátil presione repetidamente la tecla F2 para entrar en la BIOS 7) Presione F9 y YES para cargar los valores por defecto de la BIOS 8) Modifique en el menú Main la opción F12 Boot Menu poniéndolo en [Enabled] 9) Verifique en el menú Boot que la opción Boot Mode sea puesta en [UEFI] 9) En el menú Security seleccione Set Supervisor Password y ponga una contraseña que no puede olvidarse (p.ej. acer) 10) En este mismo menú Security abajo, seleccione la opción "Select an UEFI file as trusted for executing" / USB0 / <efi> / <boot> / bootx64.efi 11) Ponga como Boot Descrption: Windows y confirme dándole a YES 12) Presione F10 y YES para salir y guardar los cambio realizados en la BIOS 13a) Cuando se pone la pantalla en negro y el portátil se reinicia, empiece a presionar repetidamente la tecla F12 hasta que aparezca el Boot Manager 13b) Solamente en el caso que no se haya cargado el Boot Manager, apague el ordenador y al encenderlo presione repetidamente F12 para entrar en el menú Boot Manager 14) Seleccione Windows para arrancar desde el medio de instalación USB de Windows 10 en modo UEFI y empezar la instalación

Perfecto , pero la unidad sigue sin aparecer , esto ya empieza a ser mosqueante !!!!! , los vuelvo a llamar y esta vez un italiano muy majo me envía el siguiente email
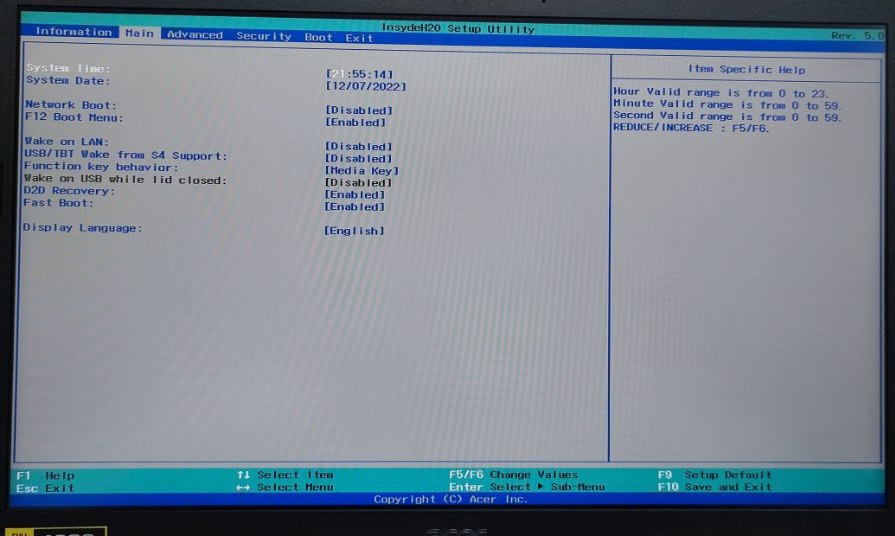
Estimado Cliente en relación a su solicitud les pasamos otro procedimiento mas adecuado al modelo 1) A través del siguiente enlace, descargue la herramienta de Microsoft (MediaCreationTool20H2.exe) para crear un medio de instalación USB de Windows 10 en modo UEFI: https://www.microsoft.com/es-es/software-download/windows10 2) Ejecute el programa recién descargado, acepte los términos de licencia y seleccione la opción: Crear medios de instalación (unidad flash USB, DVD o archivo ISO) para otro PC 3) Seleccione el idioma, la arquitectura e la edición: español (España) / Windows 10 / 64-bit (x64) 4) Elija que medio usar: Unidad flash USB (se necesita un pendrive de 8GB mínimo, que será formateado y dedicado para este uso) 5) Un vez terminada la creación del medio de instalación USB de Windows 10 en modo UEFI, conéctelo al portátil Acer donde quiere instalar el Windows 10 6) Al encender el portátil presione repetidamente la tecla F2 para entrar en la BIOS 7) Presione F9 y YES para cargar los valores por defecto de la BIOS 8) Entre en el menú Main y presione las teclas Ctrl y S al mismo tiempo 9) Modifique la opción VMD Controller poniéndola en [Disabled] 10) Presione F10 y YES para salir y guardar los cambio realizados en la BIOS 11) Espere a que el ordenador termine de cargar EFI Shell 12) Escriba el comando exit y confirme presionando Entrar 13) Seleccione la unidad flash USB para empezar la instalación del sistema operativo Windows 10. Para cualquier consulta o en caso de que el problema persista, no dude en contactarnos llamando el Centro de Atención al Cliente de Acer. El teléfono de contacto es el 914142414 – 938003663 y el horario de atención es de 9.30 a a 18.30 de lunes a viernes. Gracias por habernos contactado y quedamos a su disposición. Saludos Cordiales,
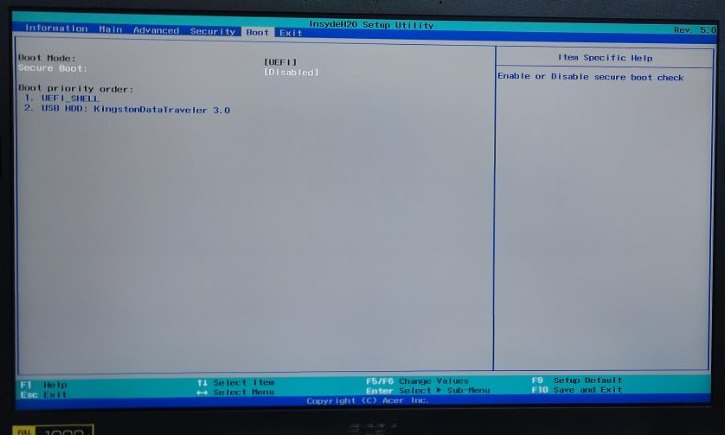
La leche , hay una combinación de teclas no documentada que hace que aparezcan opciones ocultas , esto ya parece a Monkey Island , podia ser esta parte tranquilamente.
Vuelve donde los pollos y abre con la llave la trampilla, baja y utiliza el grog en el plato del suelo para poder coger la manteca. Sube a cubierta y engrasa la puerta del camarote de la derecha con la manteca para poder entrar. Entra y coge las herramientas fantasmas

Pulsamos en Main las teclas Ctrl + S , y se produce el milagro….
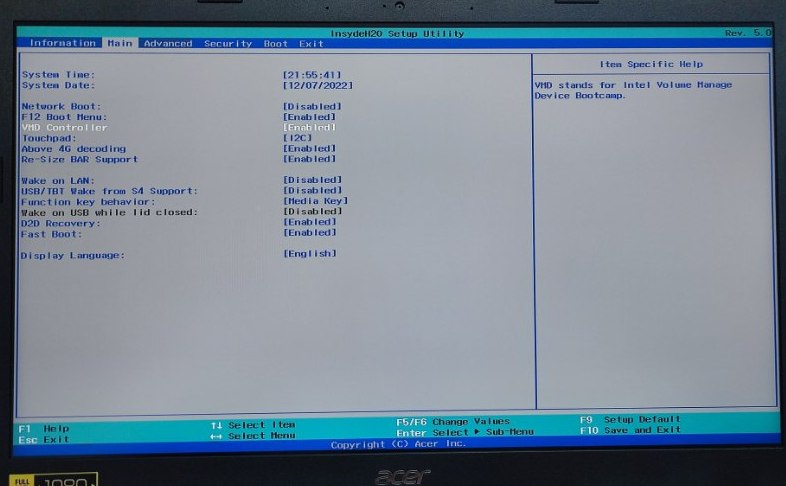
Una vez deshabilitado VMD ya aparece la unidad
Ya aparece en Macrium Reflect
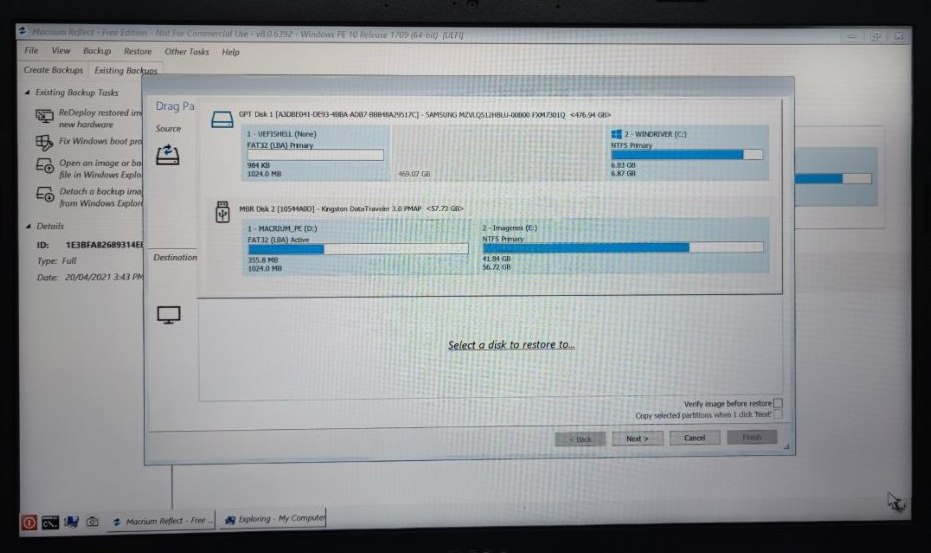
La seleccionamos como destino de la restauración de la imagen
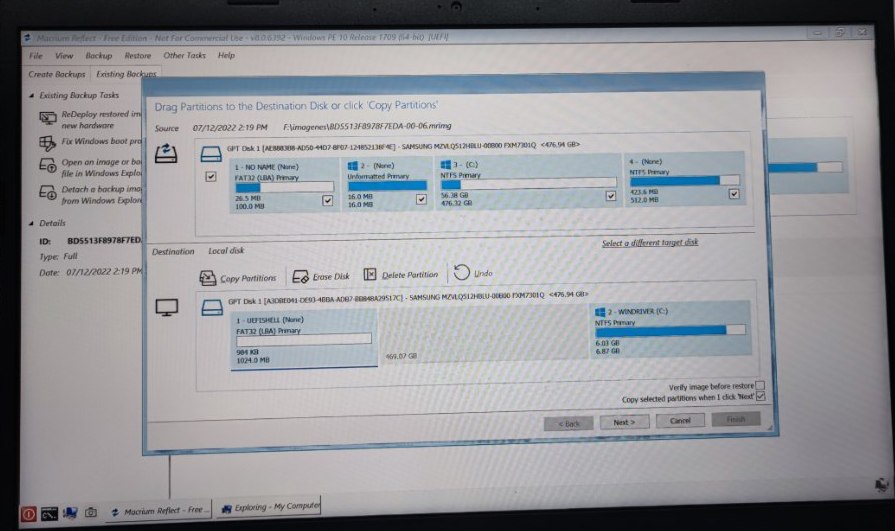
Y en diez minutos esta planchado y almidonado .
Y con esto y un bizcocho ………