
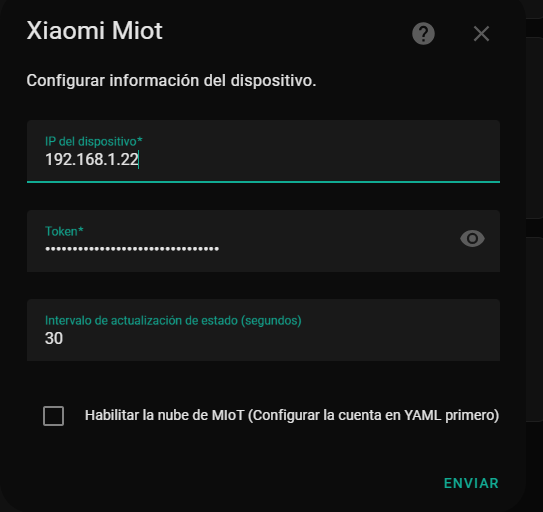
Hace unos dias me compre un S20+ para cambiarlo por el mop pro que tenia , hay dos forma de integrarlo , por cloud y en local , yo lo he integrado en local con su IP y su Token para evitar toda la parte de cloud , le tengo asignada la IP 192.168.1.22 y el token lo extraje con Xiaomi VEVS
Una vez integrado de la forma habitual
Iremos a ajustes adicionales
Información de red
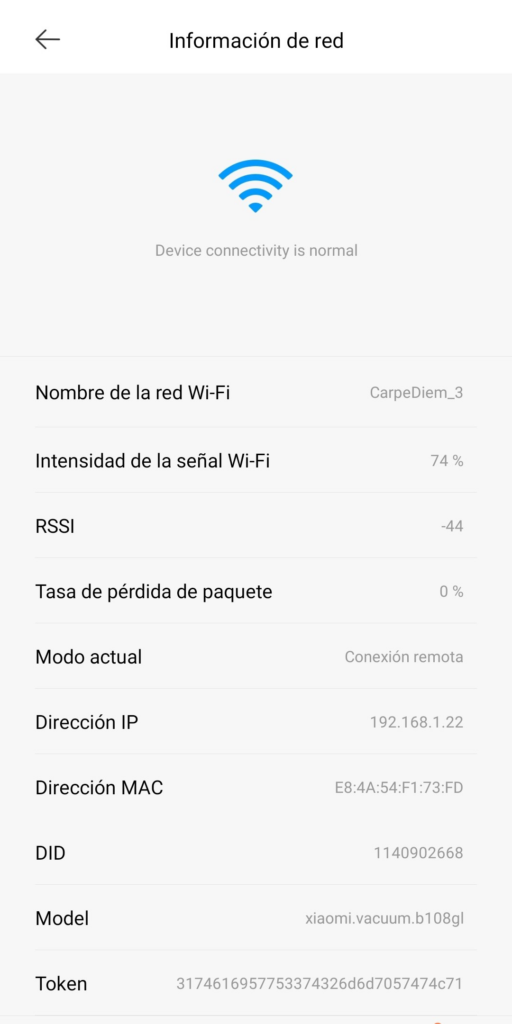
Al final de la sección veremos el token del dispositivo
Añadiremos en custom_components la integración Xiaomi MIOT en este caso la versión 0.7.22
En HACS buscaremos la integración , y la configuramos con ambos datos
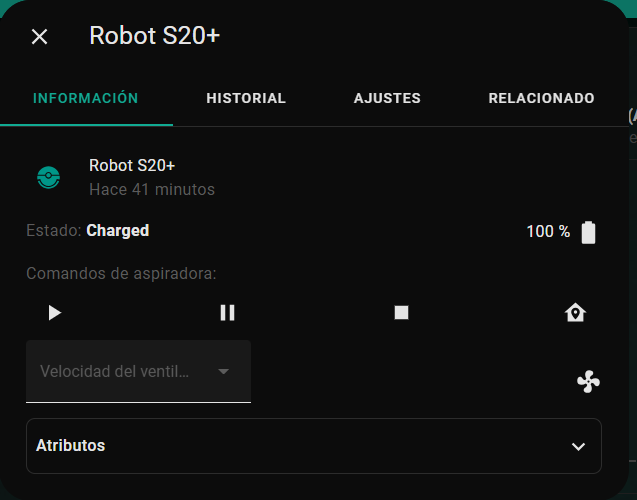
Una vez añadido ya nos aparecerá la entidad
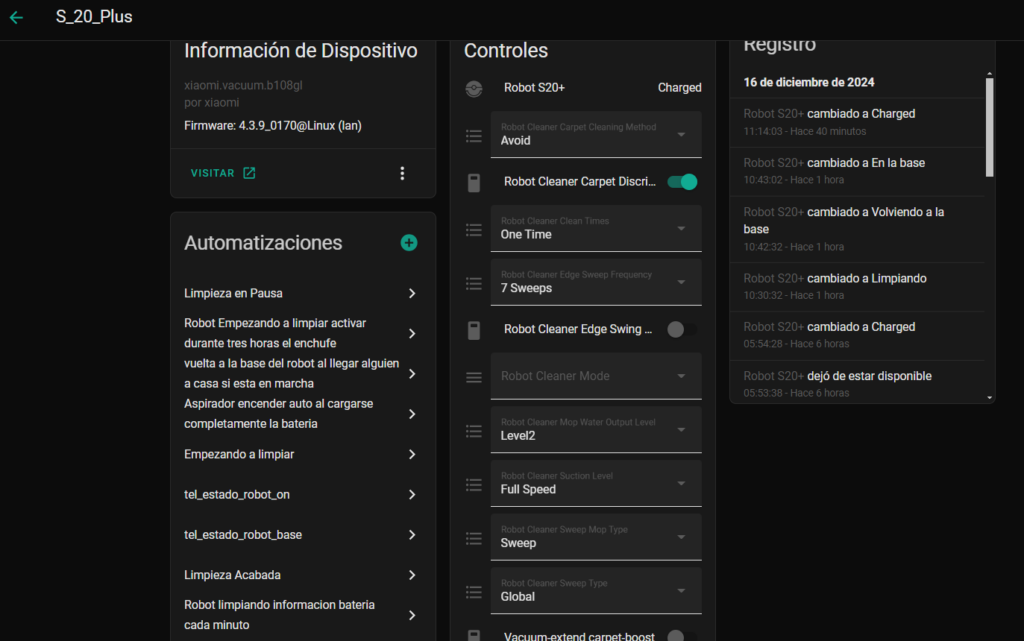
Ya podemos mostrarlo en lovelace
Lo tuneamos un poco en el customize.yanl
vacuum.xiaomi_b108gl_73fd_robot_cleaner: friendly_name: Robot S20+ # icon: mdi:robot icon: 'bha:roborock'
Lo añadimos a la parte de gestión por telegram
- service: notify.notif_telegram_bot
data_template:
# title: 'Menú'
message: |
{{"\U0001F300"}} *Estado robot aspirador* {{"\U0001F300"}}
{{"\U0001f50b"}} *Bateria:* {{ states.vacuum.xiaomi_b108gl_73fd_robot_cleaner.attributes.battery_level }}%
{{"\U0001F300"}} *Velocidad aspirado:* {{ states.select.xiaomi_b108gl_73fd_suction_level.state }}
{{"\U0001f4ab"}} *Estado actual:* {{ states.sensor.xiaomi_b108gl_73fd_status.state }}
data:
inline_keyboard:
- 'Aspirador ON:/estado_robot_on, Aspirador OFF:/estado_robot_off'
- 'Aspirador Pausa:/estado_robot_pause, Aspirador BASE:/estado_robot_base'
- 'Principal:/cancel'Empezamos con las automatizaciones :
Aquí una para que vuelva a la base si entramos en casa y no nos de la brasa
- alias: vuelta a la base del robot al llegar alguien a casa si esta en marcha
id: vuelta a la base del robot al llegar alguien a casa si esta en marcha
initial_state: 'on'
trigger:
- platform: state
entity_id: input_boolean.int_alguien_en_casa
to: 'on'
condition:
# El robot esta limpiando
condition: template
value_template: "{% if states.sensor.xiaomi_b108gl_73fd_status.state == 'sweeping' %}true{%else%}false{%endif%}"
action:
- service: notify.notif_telegram_bot
data:
message: "{{'\U0001F300'}} Robot Xiaomi *parada y vuelta a la base* alguien en casa {{'\U0001F300'}}"
- service: vacuum.pause
entity_id: vacuum.xiaomi_b108gl_73fd_robot_cleaner
- delay: 00:00:02
- service: vacuum.return_to_base
entity_id: vacuum.xiaomi_b108gl_73fd_robot_cleanerOtra para que nos envíe la información de la bateria cada minuto mientras limpia
- alias: Robot limpiando informacion bateria cada minuto
id: Robot limpiando informacion bateria cada minuto
initial_state: 'on'
trigger:
- platform: time_pattern
#cada minuto
minutes: '/1'
condition:
- condition: state
entity_id: vacuum.xiaomi_b108gl_73fd_robot_cleaner
state: 'cleaning'
action:
- service: notify.notif_telegram_bot
data:
message: Bateria Robot *{{ states.vacuum.xiaomi_b108gl_73fd_robot_cleaner.attributes.battery_level | int(0) }}%* Y a partir ahí va vuestra imaginación , y con esto y un bizcocho …..
Dejo aquí por si interesa como hacer una limpieza personalizada de cada habituación. (las habitaciones teneis que leerlas en los atributos de vuestra integracion):
limpiar_comedor_fregando:
alias: Limpiar comedor fregando
sequence:
– action: xiaomi_miot.call_action
data:
entity_id: vacuum.xiaomi_b108gl_ca95_robot_cleaner
siid: 2
aiid: 10
params:
– ‘{“room_attrs”:[{“id”:8,”room_name”:”Alex”,”fan_level”:2,”water_level”:1,”clean_mode”:1,”clean_times”:1,”mop_mode”:0,”on”:false},{“id”:11,”room_name”:”Entrada”,”fan_level”:2,”water_level”:1,”clean_mode”:1,”clean_times”:1,”mop_mode”:0,”on”:false},{“id”:7,”room_name”:”Natalia”,”fan_level”:2,”water_level”:1,”clean_mode”:1,”clean_times”:1,”mop_mode”:0,”on”:false},{“id”:10,”room_name”:”Pasillo”,”fan_level”:2,”water_level”:1,”clean_mode”:3,”clean_times”:2,”mop_mode”:0,”on”:false},{“id”:12,”room_name”:”Aseo1″,”fan_level”:2,”water_level”:3,”clean_mode”:3,”clean_times”:2,”mop_mode”:0,”on”:false},{“id”:9,”room_name”:”Aseo2″,”fan_level”:2,”water_level”:2,”clean_mode”:3,”clean_times”:2,”mop_mode”:0,”on”:false},{“id”:5,”room_name”:”Cocina”,”fan_level”:2,”water_level”:3,”clean_mode”:3,”clean_times”:2,”mop_mode”:0,”on”:false},{“id”:3,”room_name”:”Comedor”,”fan_level”:2,”water_level”:1,”clean_mode”:3,”clean_times”:2,”mop_mode”:0,”on”:true},{“id”:4,”room_name”:”Dormitorio”,”fan_level”:2,”water_level”:2,”clean_mode”:3,”clean_times”:1,”mop_mode”:0,”on”:false}]}’
– action: xiaomi_miot.call_action
data:
entity_id: vacuum.xiaomi_b108gl_ca95_robot_cleaner
siid: 6
aiid: 7
params: []
– entity_id: media_player.comedor
data_template:
message: ‘Iniciando barrido y fregado comedor’
action: tts.google_say
description: Limpieza comedor fregando
icon: mdi:robot-vacuum
————–
Para saber como usar la API, esta web:
https://home.miot-spec.com/spec?type=urn:miot-spec-v2:device:vacuum:0000A006:xiaomi-b108gl:1
Impresionante aporte , mil gracias !!!!