
En esta ocasión añadiremos un buzzer o zumbador a todos los elementos que tenemos ya en nuestra placa
Existen dos tipos de zumbadores:
- Pasivos
- Activos
Los pasivos son aquellos que requieren tanto de la señal de voltaje como de la frecuencia de oscilación para producir el sonido. Entonces tenemos que tener en cuenta que nosotros elegimos la frecuencia de la señal para elegir el sonido que queremos que emita.
Los activos, ya incluyen un circuito oscilador, que es un circuito que genera la señal a una frecuencia determinada. Por esto, nosotros solamente tenemos que alimentar la pequeña bocina con el voltaje adecuado y listo, el buzzer ya está listo para emitir un sonido. Está fácil no?, la única cuestión es que el sonido no lo podremos cambiar, ya está definido por el oscilador interno.
Para diferenciarlos tenemos que alimentar al buzzer con el voltaje indicado, normalmente es de 5 Vcc, si emite un sonido es activo, si no emite sonido es pasivo.

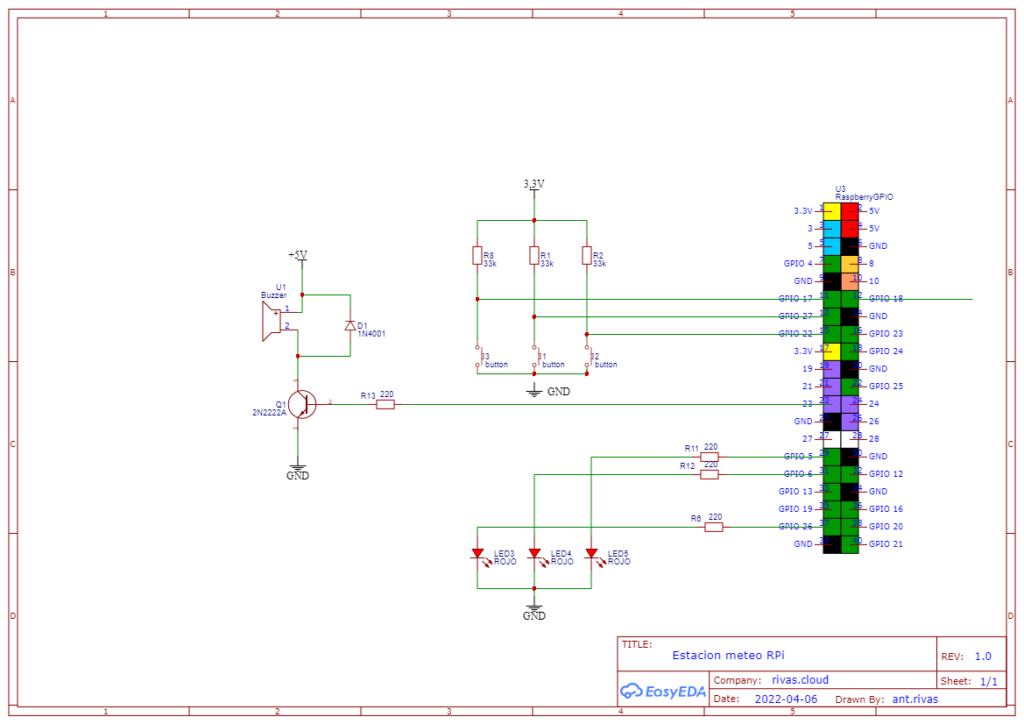
Usaremos un transistor 2N2222A para atacar al zumbador desde nuestra RPi
Aquí podéis encontrar mas información de la librería iot para dotnet ,
Crearemos un nievo proyecto C# para Net Core 3.1 y pegaremos este código.
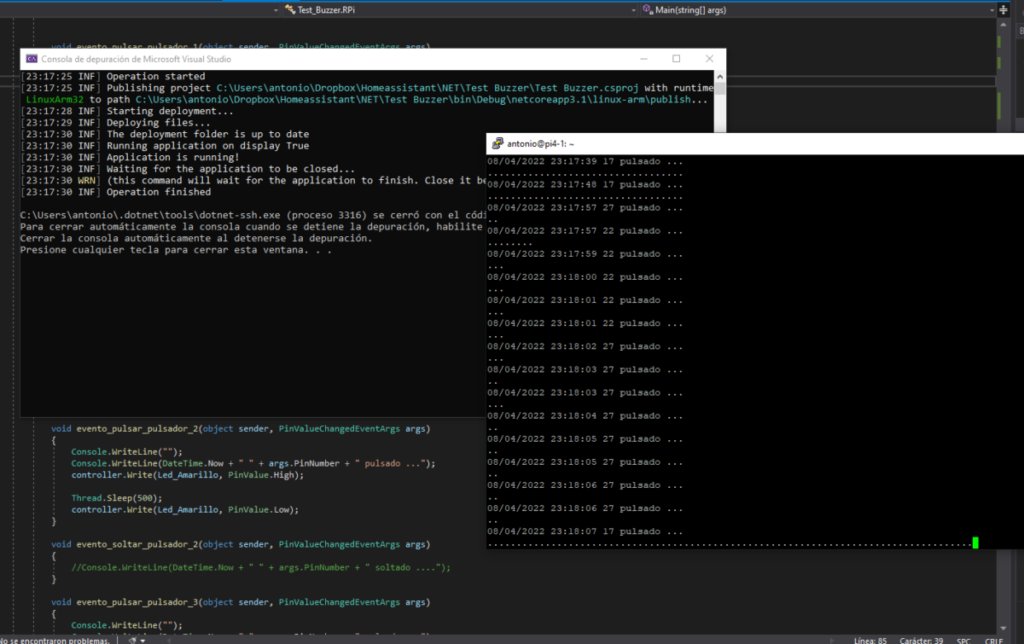
Cuando pulsemos el pulsador uno nos generara una serie de tonos que podremos escuchar , no es un sistema Hi-Fi , pero es mas que suficiente para generar alertas sonoras , podremos crear nuevos tonos jugando con la frecuencia y la duración de cada tono.
using System;
using System.Device.Gpio;
using System.Threading;
using Iot.Device.Buzzer;
namespace Test_Buzzer
{
class RPi
{
static void Main(string[] args)
{
//Codigo Raspberry pi
//Definicion de I/O
int Led_Rojo = 26;
int Led_Verde = 6;
int Led_Amarillo = 5;
int pulsador_1 = 17;
int pulsador_2 = 27;
int pulsador_3 = 22;
int pin_buzzer = 23;
GpioController controller = new GpioController();
Buzzer buzzer;
//Modo de trabajo I/O
controller.OpenPin(Led_Verde, PinMode.Output);
controller.OpenPin(Led_Amarillo, PinMode.Output);
controller.OpenPin(Led_Rojo, PinMode.Output);
controller.OpenPin(pulsador_1, PinMode.InputPullUp);
controller.OpenPin(pulsador_2, PinMode.InputPullUp);
controller.OpenPin(pulsador_3, PinMode.InputPullUp);
controller.OpenPin(pin_buzzer, PinMode.Output);
buzzer = new Buzzer(pin_buzzer);
controller.RegisterCallbackForPinValueChangedEvent(pulsador_1, PinEventTypes.Rising, evento_pulsar_pulsador_1);
controller.RegisterCallbackForPinValueChangedEvent(pulsador_1, PinEventTypes.Falling, evento_soltar_pulsador_1);
controller.RegisterCallbackForPinValueChangedEvent(pulsador_2, PinEventTypes.Rising, evento_pulsar_pulsador_2);
controller.RegisterCallbackForPinValueChangedEvent(pulsador_2, PinEventTypes.Falling, evento_soltar_pulsador_2);
controller.RegisterCallbackForPinValueChangedEvent(pulsador_3, PinEventTypes.Rising, evento_pulsar_pulsador_3);
controller.RegisterCallbackForPinValueChangedEvent(pulsador_3, PinEventTypes.Falling, evento_soltar_pulsador_3);
controller.Write(Led_Verde, PinValue.Low);
controller.Write(Led_Amarillo, PinValue.Low);
controller.Write(Led_Rojo, PinValue.Low);
while (true)
{
Thread.Sleep(250);
Console.Write(".");
}
void evento_pulsar_pulsador_1(object sender, PinValueChangedEventArgs args)
{
Console.WriteLine("");
Console.WriteLine(DateTime.Now + " " + args.PinNumber + " pulsado ...");
controller.Write(Led_Rojo, PinValue.High);
//buzzer.PlayTone(440, 1000);
buzzer.PlayTone(264, 250);
Thread.Sleep(250);
buzzer.PlayTone(264, 250);
Thread.Sleep(250);
buzzer.PlayTone(297, 1000);
Thread.Sleep(250);
buzzer.PlayTone(264, 1000);
Thread.Sleep(250);
buzzer.PlayTone(352, 1000);
Thread.Sleep(250);
buzzer.PlayTone(330, 2000);
Thread.Sleep(500);
buzzer.PlayTone(264, 250);
Thread.Sleep(500);
buzzer.PlayTone(264, 250);
Thread.Sleep(250);
controller.Write(Led_Rojo, PinValue.Low);
}
void evento_soltar_pulsador_1(object sender, PinValueChangedEventArgs args)
{
//Console.WriteLine(DateTime.Now + " " + args.PinNumber + " soltado ....");
}
void evento_pulsar_pulsador_2(object sender, PinValueChangedEventArgs args)
{
Console.WriteLine("");
Console.WriteLine(DateTime.Now + " " + args.PinNumber + " pulsado ...");
controller.Write(Led_Amarillo, PinValue.High);
Thread.Sleep(500);
controller.Write(Led_Amarillo, PinValue.Low);
}
void evento_soltar_pulsador_2(object sender, PinValueChangedEventArgs args)
{
//Console.WriteLine(DateTime.Now + " " + args.PinNumber + " soltado ....");
}
void evento_pulsar_pulsador_3(object sender, PinValueChangedEventArgs args)
{
Console.WriteLine("");
Console.WriteLine(DateTime.Now + " " + args.PinNumber + " pulsado ...");
controller.Write(Led_Verde, PinValue.High);
Thread.Sleep(500);
controller.Write(Led_Verde, PinValue.Low);
}
void evento_soltar_pulsador_3(object sender, PinValueChangedEventArgs args)
{
//Console.WriteLine(DateTime.Now + " " + args.PinNumber + " soltado ....");
}
}
}
}
En la raiz del proyecto ejecutar
dotnet tool install --global dotnet-ssh
Y para configurar seguir los pasos que nos va preguntando
dotnet-ssh configure MyRaspberryPi --auth-type UserSecrets --auth usuario:contraseña
Al compilar lo pasara a nuestra RPi
Y lo ejecutaremos con este comando
dotnet /home/antonio/net/test_buzzer/Test\ Buzzer.dll
Este es un video donde podréis escuchar el tono generado al pulsar el pulsador numero uno.
Con esto y un bizcocho ……….